
www.industrie-afrique-du-nord.com
11
'12
Written on Modified on
MapleSim ouvre de nouvelles perspectives dans la simulation HIL temps-réel des robots d’exploration planétaire
Dans l’industrie spatiale, la conception, la fabrication et les essais de prototypes de robots d’exploration planétaire, les fameux rovers, coûtent une fortune. Normalement, les essais des systèmes n’interviennent qu’en phase avancée, d’où de longs délais de développement. Face à cette situation, le Dr Amir Khajepour, titulaire de la chaire de recherche du Canada sur la mécatronique des véhicules et Professeur en ingénierie à l’Université de Waterloo, et son équipe, ont collaboré avec l’Agence spatiale canadienne (ASC) et Maplesoft, à la mise au point d’une plate-forme d’essai HIL (Hardware-in-the-Loop) pour les rovers d’exploration planétaire fonctionnant à l’énergie solaire.
Grâce à cette plate-forme d’essai, les scénarii difficiles à reproduire dans des conditions de laboratoire, comme l’environnement martien ou les composants non encore disponibles, peuvent être modélisés, tandis que les composants matériels d’ores et déjà disponibles peuvent communiquer avec ces modèles logiciels de simulations temps-réel. L’objectif est d’ajouter progressivement les composants matériels à la boucle de simulation dès qu’ils sont disponibles. Il est ainsi possible de réaliser l’essai du système sans avoir la totalité des composants matériels, ce qui comble la brèche entre les phases de conception et d’essai.
Le principal avantage de cette approche tient au fait qu’elle raccourcit considérablement le temps de développement global du projet. Elle permet par ailleurs de tester les composants en situation périlleuse sans courir le risque d’endommager un prototype abouti de rover.
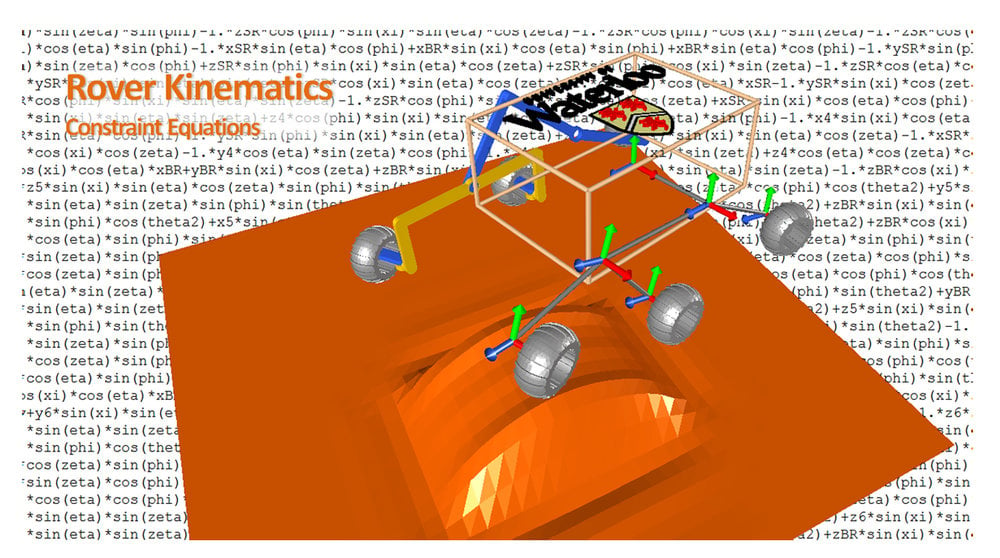
Cinématique de rover
Outre la simulation de la dynamique du rover, l’environnement de simulation MapleSim a été utilisé pour générer automatiquement les équations de la cinématique du rover.
Ces équations servent ensuite de base à d’autres tâches du projet, comme les simulations HIL, la planification du parcours et l’optimisation de la puissance. Il est possible, en raison de l’architecture modulaire du système, de modifier rapidement la configuration du rover et d’explorer différentes approches dans des délais très courts.
Cadre de travail HIL
La Figure 2 donne une vue d’ensemble de la plate-forme d’essai. Les données relatives à la position, à l’orientation, à l’inclinaison, à la vitesse et à la consommation d’énergie du rover (obtenues à partir de modèles dynamiques du rover) sont utilisées comme paramètres d’entrée des modèles logiciels. Une bibliothèque de composants de rover a été développée dans MapleSim et importée dans LabView Real-Time où le programme HIL et l’interface graphique (GUI) des simulations ont été développés. Le programme a ensuite été téléchargé sur l’ordinateur embarqué dans le PXI de National Instruments, où on a établi la communication entre les composants matériels et les modèles logiciels, avant de lancer la simulation temps-réel.
« En raison du caractère multi-domaine du système (mécanique, électrique et thermique), il était souhaitable de modéliser tous les composants au sein d’un seul et même environnement de modélisation, de manière à pouvoir identifier facilement tout lien critique. En outre, l’efficacité de calcul est fondamentale pour les simulations temps-réel », explique le Dr Khajepour. « MapleSim s’est avéré être l’environnement idéal pour cette application du fait de ses capacités multi-domaines, de l’emploi de la simplification symbolique à des fins d’efficacité de calcul supérieure, et de sa facilité de connectivité à LabVIEW ».
En plus du recours aux composants de la bibliothèque intégrée de MapleSim, les composants personnalisés ont aussi été développés facilement. Un modèle destiné à évaluer le rayonnement solaire que recevrait une surface inclinée sur Mars a été implémenté grâce au bloc de composants personnalisés de MapleSim. Ce modèle a pris en compte la position du soleil, les paramètres de latitude et longitude du rover ainsi que son orientation et son inclinaison au cours de son déplacement du point A au point B. Ces données ont été utilisées en liaison avec un modèle de panneau solaire pour évaluer la production d’énergie du rover tout au long de la journée.
« La nature intuitive de MapleSim a permis à mon équipe de créer des modèles extrêmement fidèles dans des délais très courts », confie le Dr Khajepour. « Cette caractéristique a joué un rôle clé dans le succès de cette plate-forme d’essai modulaire HIL dédiée à l’analyse des composants, à l’estimation du niveau de puissance ainsi qu’à la validation des algorithmes de gestion de la puissance et de planification du parcours ».
MapleSim a été pour l’équipe un outil clé en phase initiale du projet pour développer une solution complète de gestion de la puissance de rovers autonomes. Les ingénieurs ont fait appel à MapleSim pour concevoir rapidement des modèles multi-domaines extrêmement fidèles des sous-systèmes du rover. Il s’agissait de développer un algorithme de planification du parcours prenant en compte les besoins du rover en énergie (et sa production d’électricité). Grâce aux modèles développés, le planificateur de parcours a trouvé la trajectoire optimale entre le point A et le point B, pour que le rover puisse conserver le niveau le plus élevé de stockage interne d’énergie tout en contournant les obstacles et les portions à risque du terrain.
Le Dr Khajepour et son équipe ont pu créer le modèle mathématique du rover à 6 roues sans écrire la moindre équation. « MapleSim a su générer automatiquement un ensemble optimal d’équations, c’est là un point essentiel en phase d’optimisation », explique-t-il. Le Dr. Khajepour a également été impressionné par l’interface graphique de MapleSim. « Dans MapleSim, on peut facilement recréer le diagramme du système à l’écran, en utilisant les composants qui représentent le modèle physique. La possibilité de visualiser le modèle, les pièces en mouvement, c’est très important pour le développeur », conclut-il.
Figure 1 – Génération automatique des équations de la cinématique
Figure 2 – Cadre de travail HIL
Figure 3 – Modèle de panneau solaire dans MapleSim
